

















고정익 무인항공기, 즉 드론도 인상적인 기동을 할 수 있다. 어떤 드론은 바닷새처럼 물속에 뛰어 들고, 새처럼 착지하기도 하고 날개 모양을 바꿔가며 하늘로 솟아오르기도 한다. 그러나 수직 표면에서 착륙하거나 이륙하는 드론이 있다면? 셔브룩 대학교(Sherbrooke University)의 한 연구팀이 바로 그런 능력이 있는 드론을 만들었다!

드론의 이름은 S-매드(Sherbrooke의 Multimodal Autonomous Drone, S-MAD)라고 불리우며 지난주 리빙 머신(Living Machine ) 2017 컨퍼런스에서 연구원들에 의해 발표되었다. 이곳에서 S-매드는 ‘베스트 로보틱스 페이퍼 어워드 (Best Robotics Paper Award)’를 수상하기도 했다. 이 연구팀은 새들이 착지할 때 마지막 순간에 잠시 상승 추력을 내어 비행 경로를 조정하는 기술에서 영감을 얻었다.
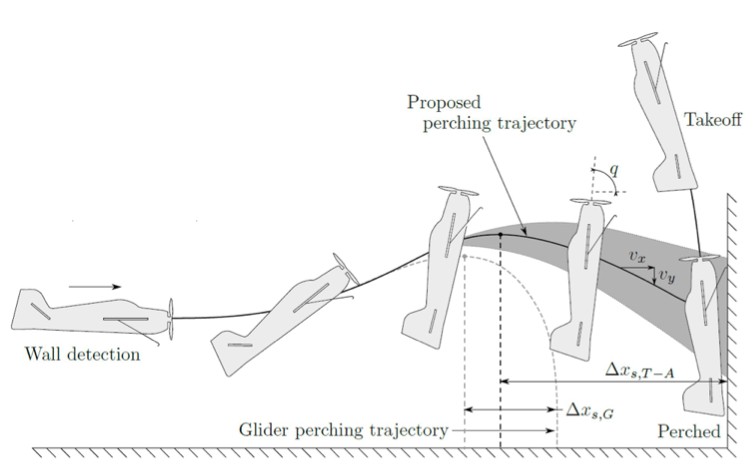
아이디어는 좋았다. 그래서 이것을 고정익 드론에 적용하여 만들어 보기로 한 것이다. 수천 개의 공기 역학적 모델링 시뮬레이션을 해가며 시험했다. 그러나 드론의 접근 시 추진력과 피치를 바로 잡아 착지를 한다는 게 결코 쉽지 않았다. 결과적으로 이뤄낸 방법은 다음과 같다. 드론이 벽을 향해 수평으로 초당 7-9 미터의 속도로 날아간다. 그런 다음 레이저 센서가 벽을 감지하면 피드백 제어 장치가 드론을 위쪽으로 기울이며 속도를 초당 1~3m로 늦춘다. 이때 벽에 근접하며 수직 자세를 유지하기 위해 추력은 오히려 증가한다.

랜딩기어라 할 수 있는 마이크로 화이버 피트(Microfiber feet)가 벽에 걸리고 서스펜션은 살짝 꺼지면서 운동 에너지의 충격을 흡수한다. 연구진은 드론의 이 ‘발’이 벽돌, 콘크리트 및 치장 벽토와 같은 어떠한 거친 표면에도 유효할 것이라고 말했다. 드론이 벽에 붙은 상태에서는 다시 ‘이륙’할 때까지 거기에 그대로 머물러 있을 수 있다. 이 지점에서 프로펠러를 다시 가동하면 떠서 날아간다.


연구팀은 이러한 유형의 드론을 사용하면 보다 확대된 임무를 수행하고 특히, 일반적인 드론이 활동할 수 없는 곳에서 활약할 수 있다고 말한다. 전력을 절약하기 위해 미션 중간에는 벽에 붙어 쉴 수도 있다. 장기적인 감시/체크 활동에 사용하거나 수직 표면에 앉을 수 있는 능력을 이용해 건축물에 대한 검사를 수행하거나 재난 지역에 파견할 수도 있을 것이다.



















최근 커뮤니트 리스트